题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
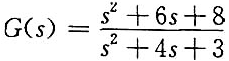
已知模拟调节器的传递函数为试写出相应数字控制器的位置型PID算法和增量型PID控制算式,设采样
已知模拟调节器的传递函数为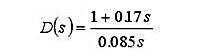
试写出相应数字控制器的位置型PID算法和增量型PID控制算式,设采样周期T=0.2s。
此题为判断题(对,错)。
 如搜索结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如搜索结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
已知模拟调节器的传递函数为
试写出相应数字控制器的位置型PID算法和增量型PID控制算式,设采样周期T=0.2s。
此题为判断题(对,错)。
如搜索结果不匹配,请 联系老师 获取答案
 更多“已知模拟调节器的传递函数为试写出相应数字控制器的位置型PID…”相关的问题
更多“已知模拟调节器的传递函数为试写出相应数字控制器的位置型PID…”相关的问题
第1题
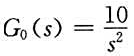
已知模拟调节器的传递函数为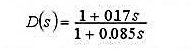
试写出相应数字控制器的位置型和增量型控制算式,设采样周期T=0.2s。
此题为判断题(对,错)。
第4题
递代控制算法的表达式。

第7题
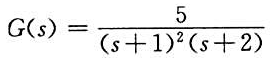
设被控对象为
试设计1个带有PID控制器和前置滤波器的单位负反馈控制系统,使系统的阶跃响应具有最优的ITAE指标,峰值时间为0.8s左右,并给出系统的单位阶跃响应曲线。
第8题
已知系统传递函数为.
试求可控标准型(A为友矩阵)、可观测标准型(A为友矩阵转置)、对角型(A为对角阵)的动态方程。
第9题
已知模拟滤波器的系统函数Ha(s)如下:

式中a、b为常数,设Ha(s)因果稳定,试采用脉冲响应不变法将其转换成数字滤波器H(x)。
第10题
已知归一化二阶巴特沃斯低通滤波器的传输函数为

要求用双线性变换法设计一个二阶巴特沃斯数字低通滤波器,该滤波器的3dB截止频率 为简单起见,设采样间隔T=2s。
为简单起见,设采样间隔T=2s。
(1)求出该数字低通滤波器的系统函数H(z);
(2)画出该数字低通滤波器的直接型结构图;
(3)设:
试写出h15(n)与h(n)之间的关系式。




为了保护您的账号安全,请在“上学吧”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!

 微信搜一搜
微信搜一搜
 上学吧
微信搜一搜
上学吧
上学吧
微信搜一搜
上学吧