 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
设被控对象为试设计1个带有PID控制器和前置滤波器的单位负反馈控制系统,使系统的阶跃响应具有
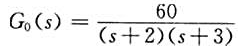
设被控对象为
试设计1个带有PID控制器和前置滤波器的单位负反馈控制系统,使系统的阶跃响应具有最优的ITAE指标,峰值时间为0.8s左右,并给出系统的单位阶跃响应曲线。
 如搜索结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如搜索结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
设被控对象为
试设计1个带有PID控制器和前置滤波器的单位负反馈控制系统,使系统的阶跃响应具有最优的ITAE指标,峰值时间为0.8s左右,并给出系统的单位阶跃响应曲线。
如搜索结果不匹配,请 联系老师 获取答案
 更多“设被控对象为试设计1个带有PID控制器和前置滤波器的单位负反…”相关的问题
更多“设被控对象为试设计1个带有PID控制器和前置滤波器的单位负反…”相关的问题
第1题
设控制系统如图10-2所示,其中被控对象
试设计最优PID控制器G0(s)及前置滤波器Cp (s),使系统具有最优的ITAE性能,且调节时间小于0.8s(Δ=2%)。
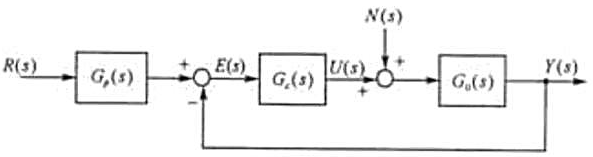
图10-2带有期望输入R(s)和扰动输入N (s)的反馈控制系统
第2题
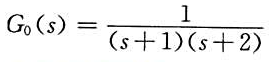
设有前置滤波器的鲁棒控制系统如图6-21所示,其中被控对象
PID控制器
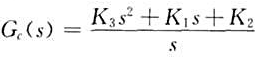
图6-21具有前置滤波器的鲁棒控制系统
Gp(s)为前置滤波器。设计要求:
(1)当Ka=10, Kb=0时,设计Gc(s)和Gp(s), 使系统具有最小节拍响应,即系统在单位阶跃输入作用下ess(∞)=0,σ%≤2% ,ts≤1s(Δ=2%); .
(2)若G0(s)的两个极点发生+50%范围摄动,在最坏情况下,被控对象变为

试用(1)中的设计结果对系统性能进行考核,以检验系统的鲁棒性。
第3题
试设计最优PID控制器G0(s)及前置滤波器Cp (s),使系统具有最优的ITAE性能,且调节时间小于0.8s(Δ=2%)。
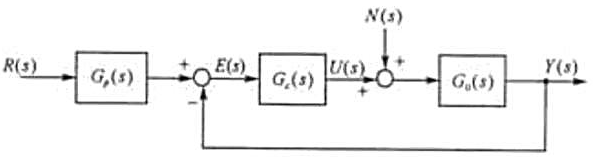
图10-2带有期望输入R(s)和扰动输入N (s)的反馈控制系统
第4题
设单位斜坡内模控制系统如图9-18所示,其中被控对象
X1(t)和x2(t)为状态变量。试设计合适的内模控制器
及状态反馈增益k3和k4,使系统的闭环极点为S1=S2= S3=S4=-2,且系统对单位斜坡输入的稳态跟踪误差为零,最后绘出系统的单位斜坡响应曲线。
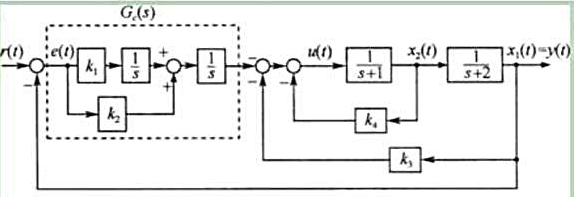
图9-18单位斜坡内膜控制系统
第5题
已知被控对象的动态方程
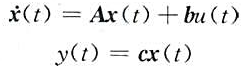
其中

要求设计单位斜坡输入时的内模控制器,使系统闭环极点为S1.2=-1±jl, s3=s4=-10, 并给出单位斜坡内模控制系统结构图与跟踪误差e (t) 的响应曲线。
第6题
设数字控制系统如图7-14所示,其中G(z)包括了零阶保持器和被控对象。已知被控对象
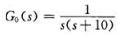
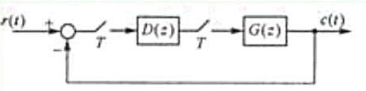
图7-14数字控制 系统,
若采样周期T=0.1s,要求:
(1)当D (z) =K时,计算脉冲传递函数G (z) D (z);
(2)求闭环系统的z特征方程;
(3)计算使系统稳定的K的最大值;
(4)确定K的合适值,使系统的超调量不大于30%;
(5)采用(4)中得到的增益K,计算闭环脉冲传递函数Φ(z), 并绘出系统的单位阶跃响应曲线;
(6)取K=0.5Kmax,求系统闭环极点及超调量;
(7)在(6)所给出的条件下,画出系统的单位阶跃响应曲线。
第7题
环极点s1=s2=s3=-2,且对阶跃输入的稳态跟踪误差为零,最后绘出系统的单位阶跃响应曲线。
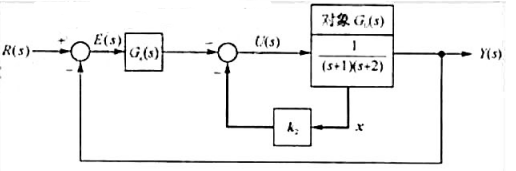
图9-16内膜控制系统
第8题

为了使系统阶跃响应的稳态误差为零,采用串联PI控制器
试设计合适的K1与K2值,使系统阶跃响应的超调量不大于5%,调节时间小于6s (Δ=2%),静态速度误差系数Ku≥0.9。
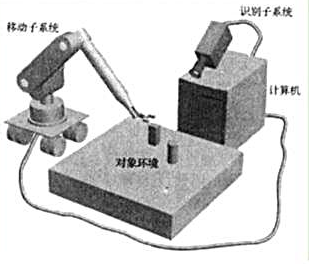
图6-26机器人和视觉系统
第9题
要求设计一个串联超前一滞后校正网络,使系统在单位斜坡输入时的稳态误差不大于0.0125,单位阶跃响应的超调量小于25%,调节时间小于3s(Δ=2%),并要求给出系统校正前后的单位阶跃输入响应曲线。试问:选用网络

是否合适?
第10题
设被控系统动态方程为
试设计全维状态观测器,使闭环极点位于-r,-2r (r>0),并画出状态变量图。




为了保护您的账号安全,请在“上学吧”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!

 微信搜一搜
微信搜一搜
 上学吧
微信搜一搜
上学吧
上学吧
微信搜一搜
上学吧















