题目内容
(请给出正确答案)
题目内容
(请给出正确答案)

[主观题]
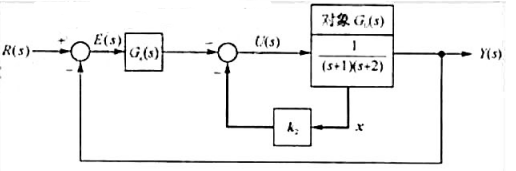
设控制系统的传递函数方框图为图(题5.9)。(1)分析说明内反馈K∫s的存在对系统稳定性的影响。(2)计
设控制系统的传递函数方框图为图(题5.9)。(1)分析说明内反馈K∫s的存在对系统稳定性的影响。(2)计
设控制系统的传递函数方框图为图(题5.9)。
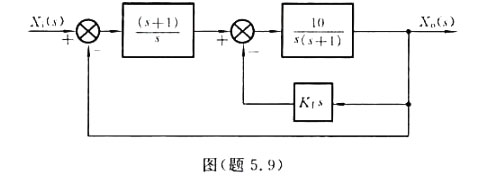
(1)分析说明内反馈K∫s的存在对系统稳定性的影响。
(2)计算系统在位置输入、单位速度输入和单位加速度输入作用下的稳态误差系数,并说明内反馈K∫s的存在对系统稳态误差的影响。
 如搜索结果不匹配,请 联系老师 获取答案
如搜索结果不匹配,请 联系老师 获取答案






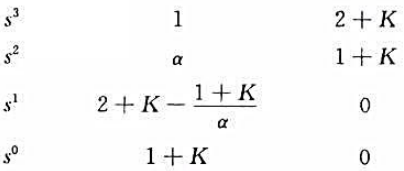
 。由方框图得,系统的特征方程为
。由方框图得,系统的特征方程为
 而其辅助方程为
而其辅助方程为
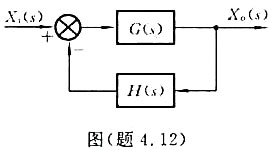
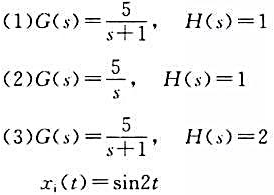
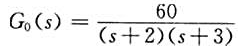
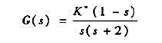
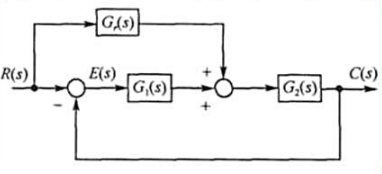
 试求系统的稳态输出。系统的传递函数如下:
试求系统的稳态输出。系统的传递函数如下: