 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
设随动系统的微分方程为其中,T1,T2和K2为正常数。若要求r(t)=1+t时,c(t)对r(t)的
设随动系统的微分方程为其中,T1,T2和K2为正常数。若要求r(t)=1+t时,c(t)对r(t)的
设随动系统的微分方程为
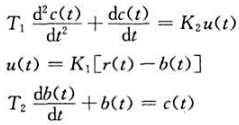
其中,T1,T2和K2为正常数。若要求r(t)=1+t时,c(t)对r(t)的稳态误差不大于正常数ε0,试问K1应满足什么条件?已知全部初始条件为零。
 如搜索结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如搜索结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
设随动系统的微分方程为
其中,T1,T2和K2为正常数。若要求r(t)=1+t时,c(t)对r(t)的稳态误差不大于正常数ε0,试问K1应满足什么条件?已知全部初始条件为零。
如搜索结果不匹配,请 联系老师 获取答案
 更多“设随动系统的微分方程为其中,T1,T2和K2为正常数。若要求…”相关的问题
更多“设随动系统的微分方程为其中,T1,T2和K2为正常数。若要求…”相关的问题
第1题
设一随动系统,其开环传递函数为

如要求系统的速度稳态误差为10%, 试确定串联校正装置的参数。
试确定串联校正装置的参数。
第2题
设系统的微分方程表示为

求使完全响应为 时的系统起始状态r(0-)和r'(0-),并确定常数C值.
时的系统起始状态r(0-)和r'(0-),并确定常数C值.
第4题
第5题
系统输出C (s)完全不受N (s)的影响,且跟踪阶跃指令的误差为零,试确定前馈补偿装置Gc1(s) 和串联校正装置Gc2(s)。
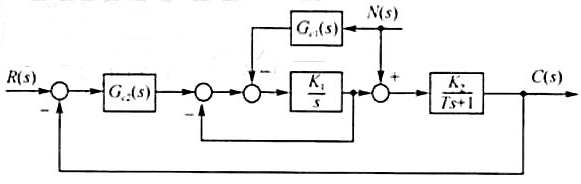
图6-16复合控制系统
第7题
某控制系统框图如图3-29所示,其中k1,k2为正常数,f为非负常数。试分析f的值:
(1)对系统稳定性的影响:
(2)对系统阶跃响应动态性能的影响;
(3)当系统输入为斜坡信号时,系统稳态误差的影响。
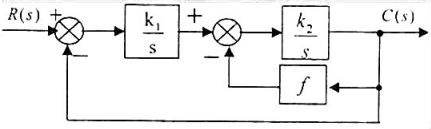
图3-29
第8题
设 [c1,c2为任意常数]是某个二阶常系数线性齐次微分方程的通解,则该方程为().
[c1,c2为任意常数]是某个二阶常系数线性齐次微分方程的通解,则该方程为().
第9题
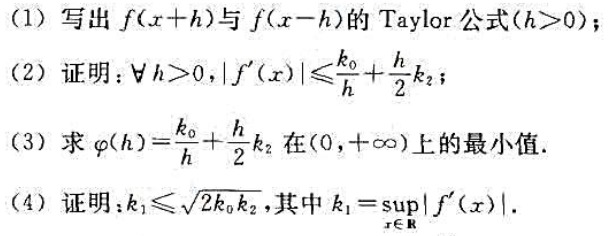
设f:R→R二阶可导,并且|f(x)|<k0,|f"(x)|<k2,k0,k2为正常数.




为了保护您的账号安全,请在“上学吧”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!

 微信搜一搜
微信搜一搜
 上学吧
微信搜一搜
上学吧
上学吧
微信搜一搜
上学吧

 ,试求其冲激响应和阶跃响应。
,试求其冲激响应和阶跃响应。 ,
, 试用s域方法求零输入响应和零状态响应。
试用s域方法求零输入响应和零状态响应。 其中A为2×2常数矩阵。已知当
其中A为2×2常数矩阵。已知当
 和A。
和A。













