 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
设二阶系统控制约束| u (t) |≤1,当系统末端自由时,求最优控制u. (t), 使性能指标取极小值,并
设二阶系统控制约束| u (t) |≤1,当系统末端自由时,求最优控制u. (t), 使性能指标取极小值,并
设二阶系统

控制约束| u (t) |≤1,当系统末端自由时,求最优控制u. (t), 使性能指标

取极小值,并求最优轨线x*(t)。
 如搜索结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如搜索结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
设二阶系统
控制约束| u (t) |≤1,当系统末端自由时,求最优控制u. (t), 使性能指标
取极小值,并求最优轨线x*(t)。
如搜索结果不匹配,请 联系老师 获取答案
 更多“设二阶系统控制约束| u (t) |≤1,当系统末端自由时,…”相关的问题
更多“设二阶系统控制约束| u (t) |≤1,当系统末端自由时,…”相关的问题
第1题
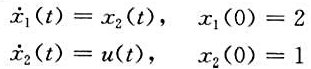
给定二阶系统
控制约束为 ,要求最优控制u* (t), 使系统在t=tf时转移到x (tf) =0,并使
,要求最优控制u* (t), 使系统在t=tf时转移到x (tf) =0,并使
其中t,自由。
第2题
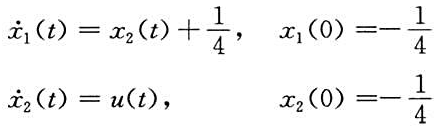
设系统状态方程及初始条件为
性能指标为

要求达到x (tf) =0,试求: (1) t1=5时的最优控制u* (t); (2) tf自由时的最优控制u*(t)。
第3题
设u=xsiny.
(1)当x,y为自变量时,求二阶全微分d2u;
(2)当x=φ(s,t),y=ψ(s,t)时,求二阶全微分d2u;
(3)φ a1S+b1+C1,ψ≠a2S+b2t+C2时,说明(2)中的d2u与(1)中的d2u不相同.
a1S+b1+C1,ψ≠a2S+b2t+C2时,说明(2)中的d2u与(1)中的d2u不相同.
第4题
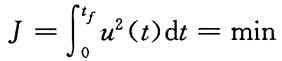
设二次积分模型为

性能指标为
已知θ(0) =ω (0) =1, θ(1) =0,ω (1)自由,试求最优控制u* (t) 和最优轨线θ* (t),ω* (t)。
第5题
设f(x)具有二阶导数,求下列函数的二阶导数
(1) ; (2)
; (2) .
.
第7题
。为了看到这一点,考虑PRE:Yt=β1+β2Xt+ut。现区分两种情形:(i)β1=0,β2=1及E(ut)=0;和(ii)β1=1,β2=0及E(ut)=Xt-1。然后在这两种情形中以X为条件求PRF的数学期望,并看你是否同意马林伍得的观点,即假定E(ut|Xt)=0非常重要。




为了保护您的账号安全,请在“上学吧”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!

 微信搜一搜
微信搜一搜
 上学吧
微信搜一搜
上学吧
上学吧
微信搜一搜
上学吧

 求二阶偏导数.
求二阶偏导数.















