 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
考虑一个反馈系统,既可以是连续时间的,也可以是离散时间的,假设该系统的奈奎斯特图穿过—1/K点,对于这个增益值,该系统是稳定的,还是不稳定的?为什么?
 如搜索结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如搜索结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如搜索结果不匹配,请 联系老师 获取答案
 更多“考虑一个反馈系统,既可以是连续时间的,也可以是离散时间的,假…”相关的问题
更多“考虑一个反馈系统,既可以是连续时间的,也可以是离散时间的,假…”相关的问题
第1题
考虑一个连续时间反馈系统,其闭环极点满足 ,利用奈奎斯特图和奈奎斯特稳定判据确定该闭环系统是稳定的K值范围。
,利用奈奎斯特图和奈奎斯特稳定判据确定该闭环系统是稳定的K值范围。
第2题
(如果存在)。
第3题
(如果存在)。


第5题
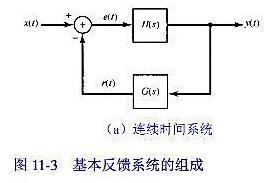
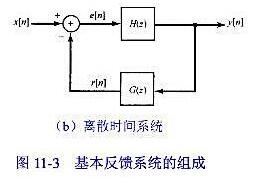
考虑图11-3(a)中的连续时间反馈系统,其 ,对于什么样的b值,该反馈系统是稳定的?
,对于什么样的b值,该反馈系统是稳定的?
第6题
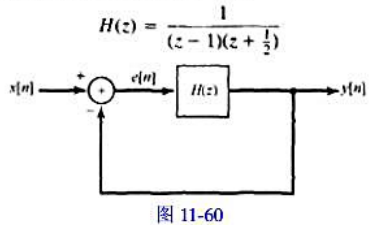
(a)考虑图11-60所示的离散时间反馈系统。假设
证明该系统在下述意义下能够跟踪一个单位阶跃,若x[n]=u[n],则

(b)更一般的是,考虑图11-60所示的反馈系统,并假设闭环系统是稳定的。假定H(z)有一个极点在z=1,证明:该系统能够跟踪一个单位阶跃。
(c)上面(a)和(b)的结果是在离散时间中的,与习题11.57和习题11.58讨论的连续时间系统的结果相对应。在离散时间中,也能够考虑在经过若干步以后完全地跟踪给定输入的系统设计问题。这种系统称为临界阻尼反馈系统(deadbeat feedback system)。
现考虑图11-60所示的离散时间系统,其 。
。
证明:整个闭环系统是一个临界阻尼反馈系统,而且在经过一步以后,就能完全跟踪上一个阶跃输入,即若x[n]=u[n],那么n≥1时e[n]=0。
(d)证明图11-60的反馈系统,在 下是一个临界阻尼系统,并具有如下跟踪性质:在经过若干步之后,输出能完全跟踪一个单位阶跃,问在哪一步,误差e[n]首先到达零?
下是一个临界阻尼系统,并具有如下跟踪性质:在经过若干步之后,输出能完全跟踪一个单位阶跃,问在哪一步,误差e[n]首先到达零?
(e)更一般地,对于图11-60所示的反馈系统,求出使y[n]在n≥N后完全跟踪上一个单位阶跃的H(z);事实上,这是要使

其中ak是给定的常数。
(f)若图11-60所示系统中的 。
。
证明:该系统在经过两步以后就能完全跟踪上一个斜坡信号x[n]=(n+1)u[n]。
第7题
考虑图11-3(b)中的离散时间反馈系统,其 ,这个系统是无限脉冲响应的,还是有限脉冲响应的?
,这个系统是无限脉冲响应的,还是有限脉冲响应的?
第9题
围。

第10题

在这种情况下,将C(z)H(z)在其上求值的围线修改成如图11-46(a)所示。
(a)证明: ,其中z=ej2π-是小的半圆与单位圆相交于实轴下面的点,而z=ej0+是相应的在实轴上面的点。
,其中z=ej2π-是小的半圆与单位圆相交于实轴下面的点,而z=ej0+是相应的在实轴上面的点。
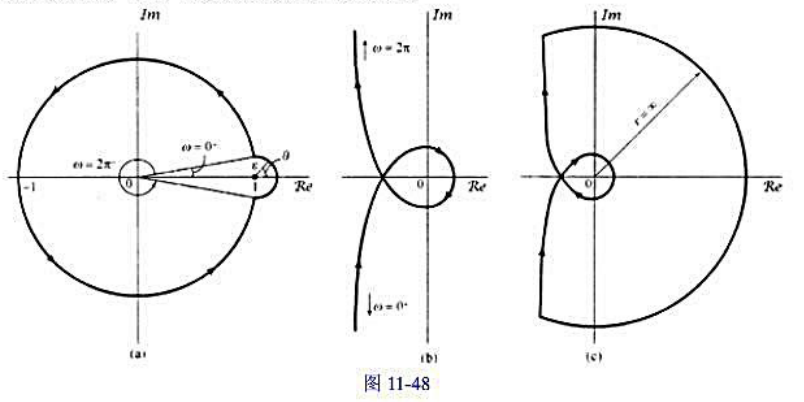
(b)利用(a)的结果,再结合式(P11.48-1),证实:图11-48(b)是当ω以逆时针方向从0+变化到2π-时,C(z)H(z)沿围线z=ejω部分的准确图形。特别是,要证明G(ejω)H(ejω)的角度变化是如图所指出的。
(c)求出使 G(ejω)H(ejω)=-π时的ω值,并证明在这一点上有|G(ejω)H(ejω)|=1。
G(ejω)H(ejω)=-π时的ω值,并证明在这一点上有|G(ejω)H(ejω)|=1。
(d)接下来考虑沿着z=1附近的小半圆上G(z)H(z)的图。注意到,当ε→0时,G(z)H(z)的模沿这条围线趋于无穷大。证明:当ε→0时,位于z=0的极点对沿该半圆的 G(z)H(z)的贡献为零;然后证明,当ε→0时,
G(z)H(z)的贡献为零;然后证明,当ε→0时, G(z)H(z)=-θ,其中θ由图11-48(a)所定义。
G(z)H(z)=-θ,其中θ由图11-48(a)所定义。
于是,当θ以逆时针方向从-π/2到+π2变化时, G(z)H(z)就以顺时针方向从+π/2变化到-π/2,其结果是图11-48(c)所示的完整奈奎斯特图。
G(z)H(z)就以顺时针方向从+π/2变化到-π/2,其结果是图11-48(c)所示的完整奈奎斯特图。
(e)利用该奈奎斯特图求出使闭环反馈系统稳定的K值范围。
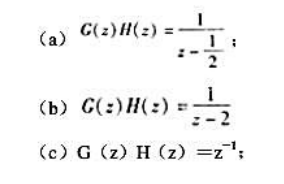
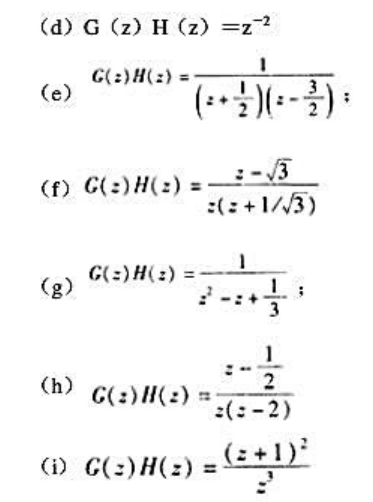
(f)依照在(a),(b)和(d)中所列步骤,画出下列每种情况的奈奎斯特图。
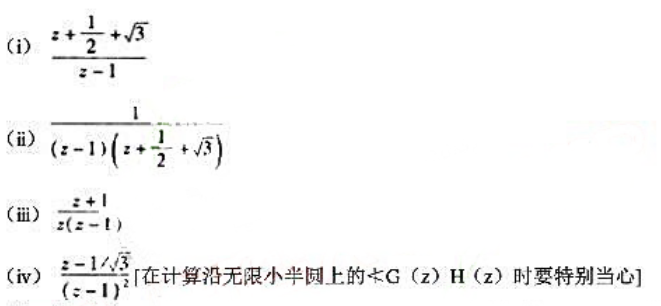
对上列每种情况,利用奈奎斯特判据,确定使闭环系统稳定的K值范围(如果存在)。并且用另一种方法(根轨迹法或作为K的函数直接计算闭环极点的方法)来对所得的奈奎斯特图的正确性给出部分校核。
(g)对于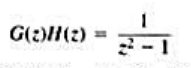 重做(f)。在这种情况下,有两个极点在单位圆上,因此必须围绕每一个极点这样来修改围线;包含一个延伸到单位圆外的无限小半圆,借此把极点置于围线的里面。
重做(f)。在这种情况下,有两个极点在单位圆上,因此必须围绕每一个极点这样来修改围线;包含一个延伸到单位圆外的无限小半圆,借此把极点置于围线的里面。




为了保护您的账号安全,请在“上学吧”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!

 微信搜一搜
微信搜一搜
 上学吧
微信搜一搜
上学吧
上学吧
微信搜一搜
上学吧

 ,对于什么样的b值,该反馈系统是稳定的?
,对于什么样的b值,该反馈系统是稳定的?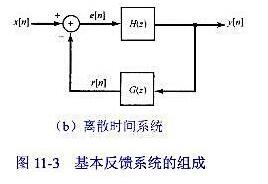
 ,利用根轨迹法确定该系统是稳定的K的正值范围。
,利用根轨迹法确定该系统是稳定的K的正值范围。













